学生管理系统
jedec
红黑树
程序员
记事本
求职招聘
新媒体运营
信息系统综合测试与管理
随机森林
堆排序
医院运营
wx.checkSession
舌象
数字化工厂
智能制造
群晖
mysql 锁机制
车规级
认证杯
HMI
手眼标定
2024/10/5 5:14:43
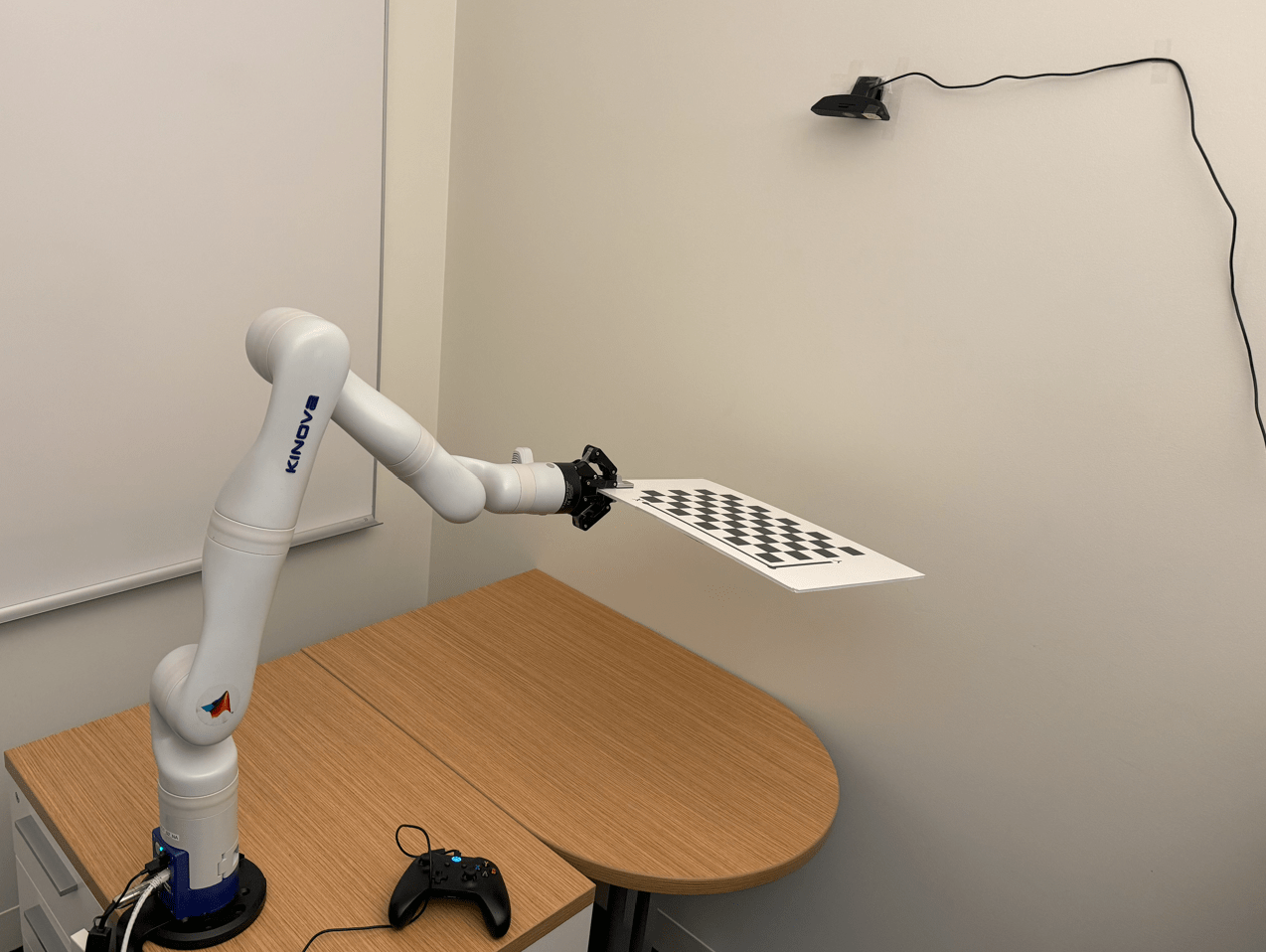
MATLAB - 机械臂手眼标定(眼在手外) - 估算固定相机相对于机器人基座的姿态
系列文章目录 前言 在拾取和放置任务中,例如垃圾桶拾取,通常会在环境中的固定位置安装摄像头,以便机器人操纵器检测工作区中的物体。基本感知管道使用该摄像头来估计目标物体相对于摄像头坐标系的姿态。然后将该姿态转换到机器人的基准坐标系…

1024程序员狂欢节特辑 | 聊一聊Halcon中的3D手眼标定
文章目录 一、问题概述1、何为手眼标定?2、手眼标定的2种形式1)眼在手上(eye in hand):即相机固定在机械臂末端2)眼在手外(eye to hand):即相机固定在机械臂以外的地方3、手眼标定公式推导二、Halcon例程解读1、初始化1)初始化显示参数2)初始化三维坐标系3)初始化标…
手眼标定 - 最终精度和误差优化心得
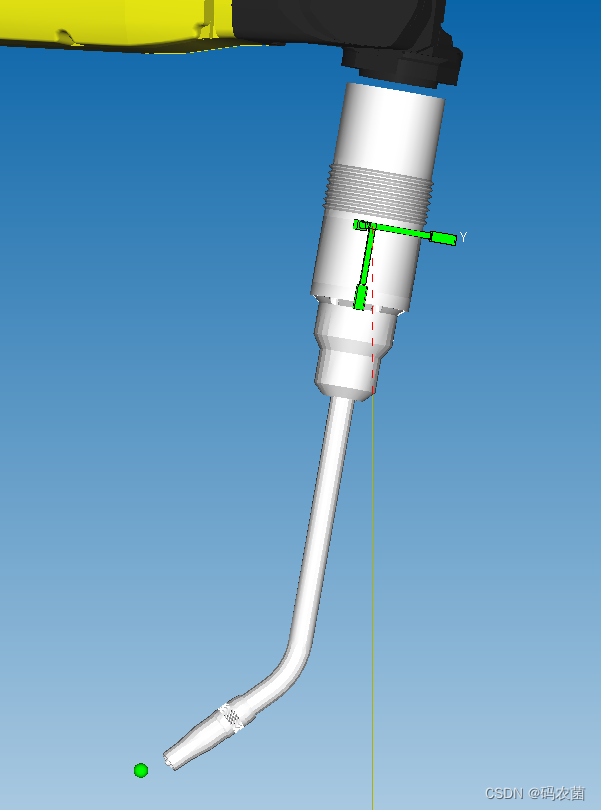
手眼标定 - 标定误差优化项 一、TCP标定误差优化1、注意标定针摆放范围2、TCP标定时的点次态与工作姿态尽可能保持相近 二、深度相机对齐矩阵误差1、手动计算对齐矩阵 三、拍照姿态1、TCP标定姿态优先2、水平放置棋盘格优先 为减少最终手眼标定的误差,可做或注意以下…

嚼一嚼Halcon中的3D手眼标定
文章目录 一、问题概述1、何为手眼标定?2、手眼标定的2种形式1)眼在手上(eye in hand):即相机固定在机械臂末端2)眼在手外(eye to hand):即相机固定在机械臂以外的地方 3…